Mikä on Lidar (LiDAR)? Lidar yhdistää tutkan etäisyysominaisuudet kameran kulmaresoluutioon ja tarjoaa tarkan syvyystietoisen havainnoinnin kuvan täydentämiseksi (kuva 1).

Kuva 1: Kamerat, tutka ja lidar ovat kolme valittua tekniikkaa autonomiseen ajamiseen. (Kuvan luotto: ADI)
Visuaalinen osa edustaa kameran tai kuljettajan näkyvyyttä, kohteen luokittelua ja sivuttaista resoluutiota. Pimeys ja sääolosuhteet, kuten lumi, pöly tai sade, voivat heikentää näitä kykyjä. Tutkaosa edustaa RF-signaalin paluuta. Tämä signaali on immuuni sääolosuhteille ja pimeydelle ja mittaa samalla etäisyyttä. Lidar-osa voi täydentää tunnistuskuvaa tarjoamalla lisäobjektien luokittelua, sivuttaista erottelukykyä, etäisyyttä ja pimeyden tunkeutumista.
Miten lidar toimii?
Lidar-järjestelmän peruselementtejä ovat neliöaaltolähetinjärjestelmä, kohdeympäristö ja optinen vastaanotinjärjestelmä, jolla tulkitaan etäisyyksiä ympäristön ulkoisiin elementteihin. Lidar-anturimenetelmä käyttää pulssilaserin muodossa olevaa valoa mittaamaan etäisyyttä analysoimalla palautetun signaalin lentoaikaa (ToF) (kuva 2).
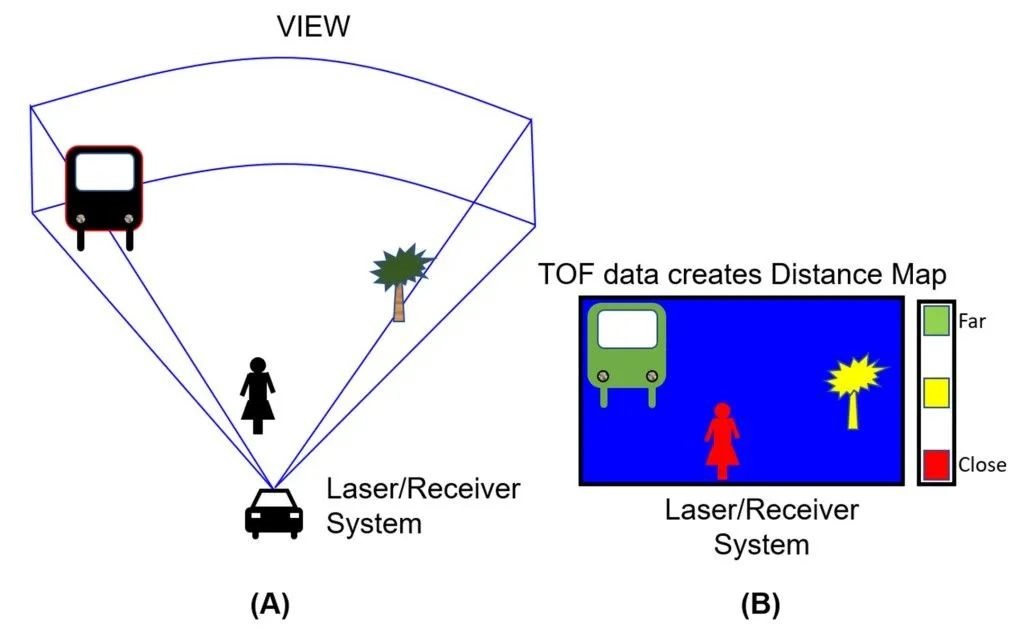
Kuva 2: Jokaisella lidar-lähetysyksiköllä on kolmion muotoinen "näkökenttä". (Kuvan luotto: Bonnie Baker)
Etäisyyden piirtäminen riippuu optisesta digitaalisesta signaalista.
Signaalit digitaalisella alueella
Lidarin piiriratkaisu on ratkaista signaalin vastaanoton ongelma autojen transimpedanssivahvistimen kautta. Tuloastetta käytetään negatiivisten tulovirtapulssien vastaanottamiseen valoilmaisimesta (kuva 3).

Kuva 3: Lidarin elektroninen osa koostuu laserdiodilähettimestä ja kahdesta valodiodivastaanottimesta. (Kuvan luotto: Bonnie Baker)
Laserdiodit lähettävät digitaalisia pulsseja lasin läpi. Tämä signaali heijastuu myös D2-valodiodissa. Tämän signaalin käsittely tarjoaa järjestelmään sisäänrakennetun siirtoajan ja elektronisen viiveen.
Digitaaliset valosignaalipulssit osuvat kohteeseen ja heijastuvat takaisin optiseen järjestelmään. Paluupulssi peilataan toiseen valodiodiin D1. D1-signaalipolun elektroninen osa on sama kuin D2-signaalipolku. Lentoaika voidaan laskea, kun kaksi signaalia saavuttavat mikro-ohjaimen (MCU).
Markkinoiden tilannekuva
Autojen lidar-järjestelmät käyttävät pulssilaservaloa kahden ajoneuvon välisen etäisyyden mittaamiseen. Autojärjestelmät käyttävät lidaria ohjaamaan ajoneuvon nopeutta ja jarrujärjestelmiä vastauksena äkillisiin liikenneolosuhteiden muutoksiin. Lidarilla on tärkeä rooli puoli- tai täysautomaattisissa auton avustustoiminnoissa, kuten törmäysvaroittimissa ja -välttöjärjestelmissä, kaistanpito-avustimessa, kaistavahtivaroittimessa, kuolleen kulman monitoreissa ja mukautuvassa vakionopeudensäätimessä. Automotive lidar korvaa tutkajärjestelmät aikaisemmissa ajoneuvoautomaatiojärjestelmissä. Lidar-järjestelmät voivat vaihdella muutamasta metristä yli 1 000 metriin.
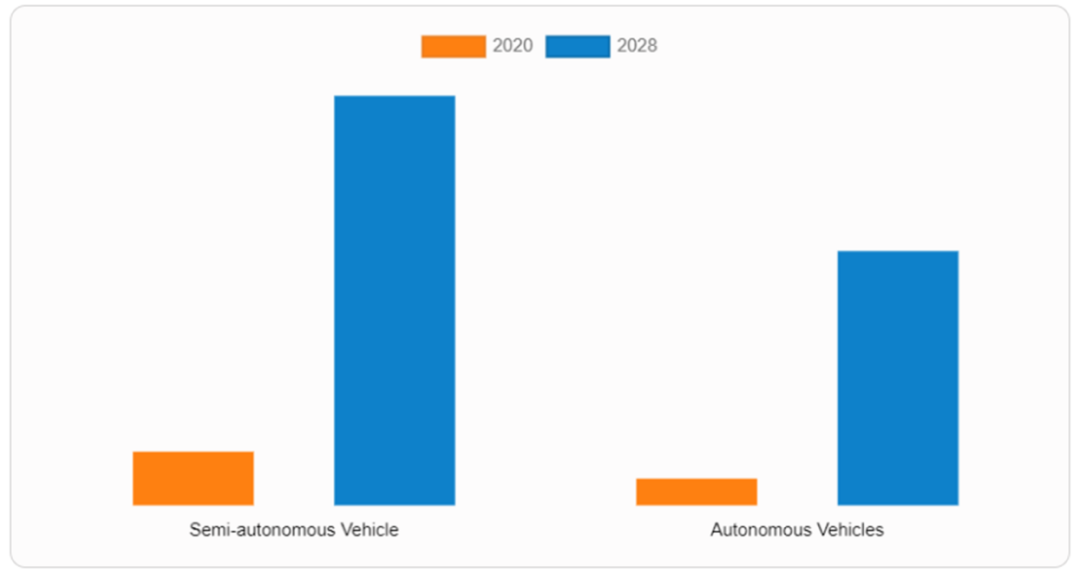
Kuva 4: Autoteollisuuden lidar-markkinat on jaettu puoliautonomisiin ja täysin autonomisiin ajoneuvosovelluksiin. (Kuvan lähde: Allied Market Research)
Itseajavat autot ovat jo laajassa käytössä, ja lidar-kuvausjärjestelmät parantavat tilannetta entisestään. Tutka, kamerat ja lidar-laitteet ovat edelleen suositeltuja teknologioita puoliautonomiseen ja täysin autonomiseen ajoon, ja lidarin hinta laskee, ja markkinat kiihdyttävät tätä muutosta.
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - Kiina kuituoptiset moduulit, kuitukytkettyjen lasereiden valmistajat, laserkomponenttien toimittajat Kaikki oikeudet pidätetään.