Satunnaisestihajautettu palautekuitulaserRaman-vahvistuksen perusteella sen lähtöspektri on vahvistettu laajaksi ja vakaaksi erilaisissa ympäristöolosuhteissa, ja puoliavoin onkalon DFB-RFL laserspektrin sijainti ja kaistanleveys on sama kuin lisäpistepalautelaitteen Spektrit ovat erittäin korkeat. korreloivat. Jos pistepeilin (kuten FBG) spektriominaisuudet muuttuvat ulkoisen ympäristön mukana, muuttuu myös satunnaiskuitulaserin laserspektri. Tämän periaatteen perusteella kuitu-satunnaislasereilla voidaan toteuttaa ultra-pitkän matkan pisteentunnistustoimintoja.
Vuonna 2012 raportoidussa tutkimustyössä DFB-RFL-valolähteen ja FBG-heijastuksen avulla voidaan tuottaa satunnaista laservaloa 100 km pituiseen optiseen kuituun. Erilaisten rakennesuunnitelmien avulla voidaan toteuttaa ensimmäisen ja toisen kertaluvun laserlähtö vastaavasti, kuten kuviossa 15(a) esitetään. Ensimmäisen asteen rakenteessapumpun lähdeon 1 365 nm laser, ja FBG-anturi, joka vastaa ensimmäisen asteen Stokes-valon aallonpituutta (1 455 nm), on sijoitettu kuidun toiseen päähän. Toisen asteen rakenteeseen kuuluu 1 455 nm:n spot FBG -peili, joka on sijoitettu pumpun päähän helpottamaan laserin muodostusta, ja 1 560 nm FBG-anturi on sijoitettu kuidun etäpäähän. Muodostunut laservalo lähetetään pumpun päässä ja lämpötilan mittaus voidaan toteuttaa mittaamalla emittoidun valon aallonpituuden muutos. Tyypillinen suhde laseraallonpituuden ja FBG:n lämpötilan välillä on esitetty kuvassa 15(b).
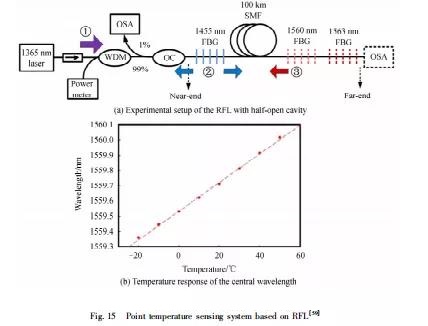
Syy, miksi tämä järjestelmä on erittäin houkutteleva käytännön sovelluksissa, on: Ensinnäkin anturielementti on puhdas passiivinen laite, ja se voi olla kaukana demodulaattorista (yli 100 km), jota käytetään monissa erittäin pitkissä -etäsovellusympäristöt. (Kuten voimalinjojen, öljy- ja kaasuputkien, suurnopeusjunaratojen jne. turvallisuusseuranta) on välttämätöntä; Lisäksi mitattava tieto heijastuu aallonpituusalueeseen, joka määräytyy vain FBG-anturin keskiaallonpituuden mukaan, jolloin järjestelmä pumpun lähteen tehon tai optisen kuidun tunnistus voidaan vakauttaa, kun häviö muuttuu; lopuksi ensimmäisen ja toisen asteen laserspektrin signaali-kohinasuhteet ovat peräti 20 dB ja vastaavasti 35 dB, mikä osoittaa, että rajaetäisyys, jonka järjestelmä voi havaita, on huomattavasti yli 100 km. Siksi hyvä lämmönkestävyys ja erittäin pitkän matkan tunnistus tekevät DFB-RFL:stä korkean suorituskyvyn optisen kuidun tunnistusjärjestelmän.
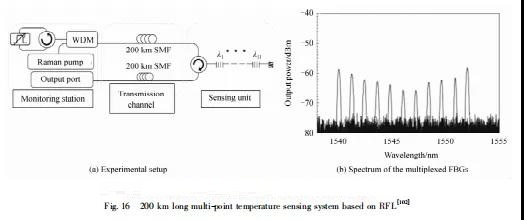
Myös yllä olevan menetelmän kaltainen 200 km:n pistemittausjärjestelmä on toteutettu, kuten kuvassa 16. Tutkimustulokset osoittavat, että järjestelmän pitkän tunnistusetäisyyden ansiosta heijastuneen anturin signaalin signaali-kohinasuhde on Parhaassa tapauksessa 17 dB, pahimmassa tapauksessa 10 dB ja lämpötilaherkkyys on 11,3 pm/℃. Järjestelmällä voidaan toteuttaa moniaallonpituusmittaus, joka mahdollistaa 11 pisteen lämpötilatietojen mittaamisen samanaikaisesti. Ja tätä määrää voidaan lisätä. Kuten kirjallisuudessa mainitaan, 22 FBG:hen perustuva satunnaiskuitulaser voi toimia 22 eri aallonpituudella. Ratkaisu vaatii kuitenkin samanpituisen valokuituparin ja valokuituresurssien tarve on kaksinkertainen verrattuna edellä mainittuun menetelmään.
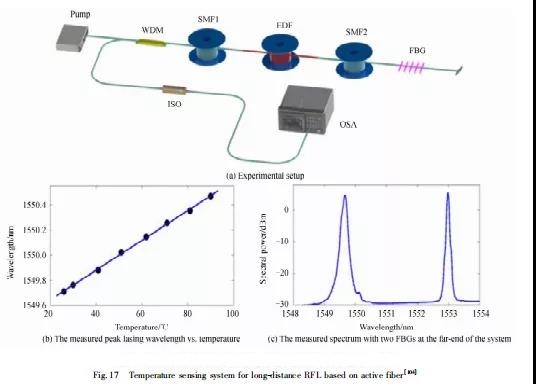
Vuonna 2016 RemoteOptinen pumppaava vahvistin, ROPA valokuituviestinnässä käyttämällä aktiivisen kuidun aktiivisen vahvistuksen sekoitettua vahvistusta jaRamanvoitto yksimuotokuidusta, kattava teoreettinen analyysi ja kokeellinen verifiointi. Aktiivikuituun perustuva pitkän matkan RFL 1,5 μm kaistalla esitetään kuvan 17(a) mukaisesti. Lisäksi satunnaislaserjärjestelmä toimii hyvin myös pitkän matkan pisteen havaitsemisessa. Otetaan esimerkkinä pistetyyppinen lämpötila-anturi. Tämän rakenteen satunnaisen laserlähtöpään huippuaallonpituudella on lineaarinen suhde FBG:hen lisättyyn lämpötilaan, ja anturijärjestelmällä on aallonpituusjakoinen multipleksointitoiminto, kuten on esitetty kuviossa 17(b) ja (c), kuten on esitetty. Erityisesti verrattuna edelliseen rakenteeseen tällä menetelmällä on matalampi kynnys ja korkeampi signaali-kohinasuhde.
Tulevaisuuden tutkimuksessa erilaisten pumppausmenetelmien ja peilien suunnittelun kautta odotetaan toteuttavan erittäin pitkän matkan kuitu-satunnaisen laserpisteentunnistusjärjestelmän, jolla on erinomainen suorituskyky.
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - Kiina kuituoptiset moduulit, kuitukytkettyjen lasereiden valmistajat, laserkomponenttien toimittajat Kaikki oikeudet pidätetään.